Detectors Technologies
Cornell–SLAC Pixel Array Detector (CSPAD)
The first detector specifically developed for use at LCLS is the Cornell–SLAC Pixel Array Detector (CSPAD). This detector is the result of a collaboration between Cornell University and SLAC National Accelerator Laboratory.
The CSPAD 140K, 560K, and 2.3M are used for both soft and hard X-ray applications. In instances where the detector needs to cover a large cross sectional area, the CSPAD 2.3M, with its large active sensor area, may be extremely useful. For further expansion of the active area beyond that provided by the 2.3M, multiple CSPADs can be install and read in-sync to cover a large cross section that cannot be covered by a single detector.
Camera Specifications
Total Length | 14.5 in |
|---|---|
Weight | 2.4 lb (1.09 kg) |
Room Temperature Operation | 5-30 °C |
# of Pixels |
|
Modules Active Area | 4 x 4 cm2 |
Quantum Efficiency vs. Energy Range |
{kind=link}
Characteristics & Measured Performance
CSPAD | High Gain | Low Gain |
|---|---|---|
Pixel per ASIC | 194 x 185 | |
Pixel Size | 110 μm | |
Noise R.M.S | 1000 eV | 3500 eV |
Max Signal (8 keV | 350 keV | 2700 keV |
Frame Rate | 120 Hz | |
Sensor Thickness | 500 μm | |
Resources
- CSPAD Troubleshooting Guide (SLAC Login needed)
- Hands-on Tutorial: CSPADs: how to operate them, which performance to expect and what kind of features are available (Video1, Video2)
- CSPAD FAQ - Philip Hart (SLAC) (Video)
Analysis Tools
- How to run the offline_ami program:
- ssh pslogin
- ssh psana
- cd /tmp/reg/g/pcds/dist/pds/ami-current/build/ami/bin/x86_64-linux-opt/offline_ami -p
- /reg/d/psdm/cxi/cxij5116/
- LCLS Data Analysis
- Detector Calibration and Management
- CSPAD common mode corrections in hybrid gain mode
ePix100

With a 50 μm pixel size, the SLAC developed ePix100 provides one of the highest resolutions of all the detectors available at LCLS. Used in both soft and hard X-ray applications, multiple ePix detectors can be installed and read in-sync in order to expand the cross section covered by the detectors.
The camera dimensions are 2 x 2 x 11.5 inch (5.1 x 5.1 x 29.2 cm), including tubings and connectors.
View ePix100 specs sheet View ePix100 Geometry
Characteristics & Measured Performance
# of Pixels | 4 x (384 x 352) |
|---|---|
Pixel Size | 50 μm |
Noise r.m.s. | 250 eV |
Max Signal | < 100 keV |
Frame Rate | 120 Hz (or up to 1kHz) |
Sensor Thickness | 500 μm |
Weight | 3.0 lbs |
ePix10k

The ePix10k is the next generation detector that replaces the CSPAD in most hard X-ray experiments. It has 20% smaller pixels, ~5x lower noise, and 4x higher dynamic range compared to the CSPADs. The ePix10k comes in a small (135k) and large (2M) pixel variant.
View ePix10 specs sheet View ePix10 Geometry
Characteristics & Measured Performance
Pixels | 100 x 100 μm |
|---|---|
Noise r.m.s. | 320 eV |
Max Signal | 11000 keV |
Frame Rate (Hz) | 120 Hz (or up to 1kHz) |
Sensor thickness | 500 μm |
Rayonix MX170 & 340


The Rayonix MX170-HS and MX340-XFEL are commercial CCDs with high spatial resolution/dynamic range and adjustable on-board binning.
For extra high resolution applications, the 44um pixel size can accommodate at the cost of readout speed.
- Quantum Efficiency: up to 0.8 for 8 keV - 12 keV
Camera Specifications
| MX170-HS | MX340-XFEL (in MFX) |
|---|---|---|
# of Pixels | 3840 x 3840 | 7680 x 7680 |
Active Area Dimensions | 170 x 170 mm2 | 340 x 340 mm2 |
Pixel Size | 44 µm | 44 µm |
Electro-Optical Gain | 7e-/12keV photons | 7e-/12keV photons |
Full Well Capacity | 360 ke-/pixel | 360 ke-/pixel |
Noise | 8e-/pixel | 8e-/pixel |
QE | 0.8 (8keV-12keV) | 0.8 (8keV-12keV) |
Signal Dynamic Range | 16-bits | 16-bits |
On-Chip Binning | Square binning: 1 x 1, 2 x 2, | Square binning: 1 x 1, 2 x 2, |
Frame Rate | Depends on binning | Depends on binning |
View Rayonix MX170-HS specs sheetView Rayonix MX340-XFEL specs sheet
Jungfrau

The Jungfrau is a fast, large dynamic-range X-ray camera deployed at LCLS for hard to tender X-ray in-air applications since run 15.
The in-air camera dimensions are approximately 38 x 9 x 10 cm3 (38 x 13 x 10 cm3) including connectors and tubing for the 0.5 M (1 M).
Beginning in Run18, the CSPAD2.3M in the CXI/SC1 chamber will be replaced by the Jungfrau 4M detector, which will allow for higher signal and spatial resolution, as well as a larger dynamic range for hard X-ray experiments. The detector is made up of 8 modules arranged around a 9mm beamhole.
Characteristics & Measured Performance
| Jungfrau 0.5M | Jungfrau 1M | Jungfrau 4M (in CXI) |
|---|---|---|---|
# of modules | 1 | 2 | 8 |
# of Pixels per Module | 1024 x 512 | 1024 x 512 | 1024 x 512 |
Application | Air only | Air only | Vacuum only |
Pixel Size (μm) | 75 | 75 | 75 |
Noise r.m.s. (eV) | 180-270 | 180-270 | 180-270 |
Max Signal (8 keV photons equivalent) | 15,000 | 15,000 | 15,000 |
Frame Rate (Hz) | up to 2k | up to 2k | up to 2k |
Sensor Thickness (μm) | 320 | 320 | 320 |
Weight (kg) | 2-3 | 2-3 | 2-3 |
Additional Images


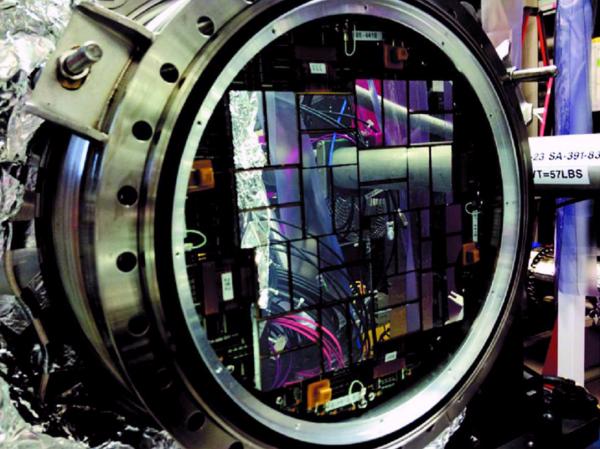
pnCCD
The pnCCD is often used for soft X-ray applications. A 75 μm pixel resolution and a large active sensor area mounted on a servo-motor allows for flexibility in the cross section that it covers. The top and bottom halves of the front pnCCD can move independently (vertically) of each other, allowing each to cover a different kinematic region.
The pnCCD detector is used primarily in the AMO hutch. Two detectors front (upstream) and back (downstream) are available for use. The front detectors are on a servo-motor, allowing for the two vertical halves of the detectors to move in all 3 directions. This allows greater flexibility to users in choosing their kinematic regime of interest.
Camera Specifications
# of Pixels | 2 x (1024 x 512) |
|---|---|
Pixel Size | 75 μm |
Max Signal | 6000 keV |
Gain Range | 1/256 to 1 |
Frame Rate | 120 hz |
More Specifications
- When installed, the top half of the front pnCCD is approximately 5mm upstream of the bottom half.
- There are 4 ASICs on either side of a single pnCCD plane (for a total of 8 per plane).
- Dynamic range as well as Z position w.r.t interaction point may vary depending on in-chamber setup. Top and Bottom planes of front pnCCDs move independently of each other vertically. Back pnCCD does not move.
- A 300 nm thick polyimide filter is placed in front of the pnCCD to prevent sample debris from accumulating on the sensors.
System Information
- Cooling: Sumitomo HC-8E Compressor with a CH-104 Coldhead
- Power: Rohde Schwartz NGPS32 Dual Bipolar Power Source
- Signal Readout: Keithley 2400 Source Meter, Lakeshore 335 Temperature Controller
Analysis Tools
- ssh to pslogin.slac.stanford.edu
- ssh to psana.slac.stanford.edu
- /reg/g/pcds/dist/pds/ami-current/build/ami/bin/x86_64-linux-opt/offline_ami